6 Minutes
Sissejuhatus
Rätik, mis oli kokku volditud nii, nagu oleks selle puudutanud hoolas inimene. Plokid, mis olid tasa lahti võetud stabiilsete kätega. Väikesed saavutused, võib-olla, kuid informatiivsed. Xiaomi uus Robotics-0 mudel ei ole rõhutatult glamuurne tarbeese; see on katse õpetada masinatele nägema, mõistma ja liikuma sellise peenusega, mida oleme kaua omistanud inimintuitsioonile.
Robotics-0: eesmärk ja lähenemine
Robotics-0 südames püüab sulgeda ringi, mis määratleb iga suutva roboti: tajumine, otsustamine ja teostus. Ettevõte nimetab seda „füüsiliseks intelligentsuseks” — kokkuvõttev termin, mis varjab hulka keerukaid probleeme. Kuidas hoida süsteemi teravana nii keele- kui pildimõtlemises, samal ajal õpetades seda millimeetri-täpsusega liigutusi tegema? Xiaomi vastus on arhitektuur, mis eraldab mõtlemise liigutamisest.
Arhitektuuri ülevaade
Arhitektuur põhineb Mixture-of-Transformers põhimõttel: vastutus jagatakse erinevatele mudelitele, selle asemel et suruda kõik ühte monoliitsesse mudelisse. See lahendus vähendab tuntud probleemi mõju: kui nägemis-keele mudelit sunnitakse otse tegutsema, kipub ta kaotama osa oma mõtlemisvõimest. Eraldatud moodulite kaudu säilib nii pildiline ja keeleline mõtlemine kui ka täpne motoorne teostus.
Visuaal-keele mudel (VLM)
Üks külg on Visuaal-Keele Mudel — mõelge sellele kui roboti tõlgile. See töötleb kõrglahutusega kaameraandmeid ja inimeste juhiseid, sh ka uduseid või ebatäiuslikke käske: „Palun voldi rätik.” Mudel tegeleb objektituvastuse, ruumiliste suhete, visuaalse küsimuste-vastuste ja elementaarsuutlikkusega, mis suudab piksleid ülesandeks muuta. VLM säilitab rikkaliku semantilise esinduse, mis on vajalik ka pikema spektriga ja mitmetähenduslike tegevuste mõistmiseks.
Tegevuse ekspert (Action Expert)
Teine külg on Action Expert — Diffusioon-Transformer, mis ei püsi üheainsa mootorikäskluse väljastamisel, vaid genereerib „tegevuse tükke” (Action Chunks) — lühikesi koordineeritud liikumiste jadusid. See lähenemine annab sujuvamaid üleminekuid ja vähendab äkilisi parandusi või värinaid. Praktiliselt tähendab see, et robot ei soorita iga sammu kui isoleeritud käsku, vaid järgib väikese, kuid sidusa liikumisploki logikat.
Treeningu ja koondõppe mehhanismid
Robotics-0 treening on mitmeastmeline protsess. Esiteks toimub Action Proposal etapp, kus visuaalne mudel ennustab jaotuslikult sobivaid tegevusi, lugedes samaaegselt pilti. See samm joondab nägemise ja tegemise sisemisi esindusi. Seejärel külmutatakse visuaalne osa — et vältida selle mõistmisvõime ahenemist — ja Diffusion Transformer treenitakse mürarikkuseid tegevussekvensse denoise'ima: ebaselgetest oletustest tehakse täidetavaid liigutusi, juhendatuna key-value tüüpi tunnuste kaudu, mitte ainult diskreetsete keelelistena tokenitest.
Selles protsessis on mitu tehnilist nüanssi, mis väärivad tähelepanu:
- Mitmemodaalne koondõpe: koos pildiliste ja keeleliste näidete ning tegelike tegevustrajektoriatega õpib süsteem siduma visuaalset konteksti konkreetsete liigutusmustritega.
- Key-value juhendamine: tegevuste denoise-imisel kasutab Diffusion Transformer sisendsalvestust (feature maps), mis annab konteksti ilma keeleliste tokenite diskreetse piiranguta; see aitab säilitada peene motoorse info tihendamist.
- Hierarhilised tegevuse tükid: tegevused jaotatakse lühikesteks jadadeks, mis vähendavad vea kumuleerumist pika ulatusega ülesannetes.
Reaalmaailma süsteemsed optimeerimised
Tööstuslikud ja uurimuslikud robotid puutuvad kokku praktiliste hõõrdumisega: latentsus (viivitus) on üks neist. Kui mudel „mõtleb” liiga kaua, võib robot tarduda või väriseda. Xiaomi lahendab selle asünkroonse inferentsi abil: arvutus ja riistvara töötavad osaliselt iseseisvalt, et liikumine jääks sujuvaks isegi siis, kui mudel veel arvutab. See on kriitiline kodu- või tööstuskeskkonnas, kus katkestused võivad põhjustada objektide kukkumist või tegevuse ebaõnnestumist.
Lisaks kasutatakse varasemaid ennustatud tegevusi tagasisidena — nn „Clean Action Prefix” —, mis vähendab värinat ja säilitab tegevuse momentumit. Tähelepanumask, mille kuju on laenatud lambda (Λ), kallutab süsteemi eelistama praeguseid visuaalseid vihjeid aegunud ajaloo asemel, parandades reageerimisvõimet ootamatute muutuste puhul.
Tehnilised nüansid: miks see töötab
Mõned olulised tehnilised valikud aitavad seletada, miks Robotics-0 suudab saavutada silmapaistvaid tulemusi reaalses maailmas:
- Jagatud esindused: visuaalse mudeli ja tegevuse eksperdi eraldamine võimaldab kumbagi optimeerida oma eesmärgi järgi: VLM säilitab semantika; Action Expert keskendub motoorsetele trajektooridele.
- Diffusioonipõhine liikumisgeneratsioon: Diffusion Transformer kasutab iteratiivset mürast puhastamise protsessi, mis sujuvalt muundab algse, ebatäpse ettepaneku täidetavaks liikumiseks.
- Lambda-maski tähelepanu: ajaliselt kallutatud tähelepanu tähendab, et süsteem võtab rohkem arvesse värskeid visuaalseid signaale, mis on oluline dünaamiliste või ettearvamatute olukordade jaoks.
- Asünkroonsus ja puhversüsteemid: Clean Action Prefix ja asünkroonne inferents võimaldavad käitumist säilitada ka siis, kui kõrgetasemeline otsustusmudel perioodiliselt uuendusi genereerib.
Tulemused ja võrdlused
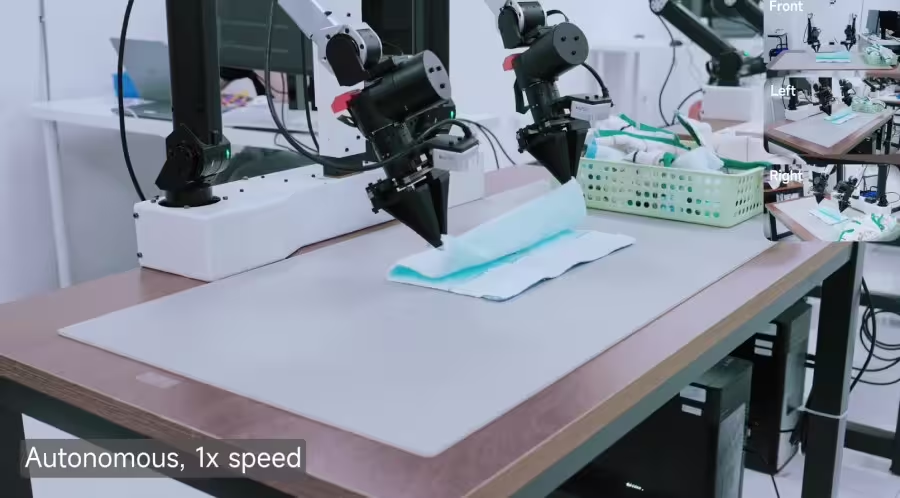
Benchmarigid annavad osa loo: Xiaomi teatab tipp-tulemustest LIBERO, CALVIN ja SimplerEnv simulatsioonide valdkondades, edestades umbes 30 peer-süsteemi. Kuigi numbrid on olulised, on räägitav ka reaalmaailma testides. Kahekäelisel platvormil sooritas Robotics-0 pika horisondiga ülesandeid, nagu rätiku voltimine ja plokkide lahtivõtmine, näidates stabiilset käe-silma koordineerimist ning võimet käsitleda nii jäikeid kui painduvaid objekte ilma ilmsete riketeta.
Oluline on eristada simulatsioonide ja füüsiliste katsete tulemusi. Simulatsioon võimaldab kiiret iteratsiooni ja kvantitatiivset võrdlust, kuid füüsilised katsed paljastavad praktilised piirangud: haardekontroll, materjali elastsus, mehaanilised tolerantsid ja sensorite müra. Robotics-0 kujutab endale eesmärki lahendada need mitmekihilised väljakutsed arhitektuursete ja algoritmiliste valikutega.
Avatud lähtekood ja uurimistöö mõju
Veel üks praktiline punkt: Xiaomi avaldab Robotics-0 avatud lähtekoodina. See on teadusliku arengu kiirendamiseks oluline. Kui meeskonnad saavad uurida koodi, replitseerida eksperimente ja ehitada üksteise töödele, kasvab valdkonna iteratsioonikiirus. Ootuspäraselt ilmnevad järeltööd, forkid ja kiire iteratsioon, kus sama VLA (vision-language-action) ideed rakendatakse erinevatel riistvaraplatvormidel ja eri rakendustes.
Avatud lähtekood loob ka platvormi võrdlemiseks: teadlased ja insenerid saavad lisada instrumente, logimist, diagnostikat ja täpsustada hinnanguid, mis aitab valdkonnal minna kiiremini edasi kui kinniste süsteemide puhul. Lisaks soodustab see koostööd, standardiseerimist ja ühtlustatud benchmarkide loomist.
Piirangud ja avatud küsimused
Robotics-0 ei lahenda kõiki probleeme. Peamised järelejäänud väljakutsed hõlmavad pehmete objektide manipuleerimist, üldistamist väga erinevatesse keskkondadesse ja täielikku autonoomiat keerulistes, dünaamilistes kodustes või tööstuslikes olukordades. Konkreetsemalt:
- Pehmete objektide käsitlemine: elastsete ja ebastabiilsete materjalide puhul on modelleerimine ja kontroll keerukamad; haare ja surveandmete integreerimine jäävad oluliseks uurimisvaldkonnaks.
- Üldistamine: mudeli võime rakendada õpitud strateegiaid keskkondadele, mis erinevad oluliselt treeningsettidest, on piiratud ja nõuab robustsuse kasvamist.
- Täisautonoomia: täielikult autonoomsete süsteemide korral tuleb arvestada pikaajalise planeerimise, vigade taastamise ja ohutuse protokollidega, mis ületavad lühikeste tegevustükkide tasandi lahendusi.
Millal näeme seda kodus?
Kui huvitab teid, kuhu robotid järgmisena liiguvad, tasub jälgida, kuidas see mudel käitub väljaspool Xiaomi laborit ja millised komponendid kogukond alles jätab ja täiustab. Järgmine kord, kui majapidamisrobot voldib teie rätiku, võite igas siledas voldis märgata Robotics-0 mõju jälgi: arhitektuurivalikud, mis on suunanud tähelepanu nägemisele ja tegevusele ilma, et kumbki aspekt teist ära sööks.

Tehnilised soovitused ja edasised uurimissuunad
Edaspidi võivad huvitavad uurimissuunad ja praktilised täiustused hõlmata järgmisi valdkondi:
- Hügriidne andmete kogumine: kombineerides reaalse maailma trajektoorid ja kõrgkvaliteetsed simulatsioonid, saab laiendada treeningandmestikke nii, et mudel õpiks paremini üldistama.
- Tajunavigatsioon ja planeerimine: integreerida sügav planeerimine, mis suudab siduda kõrgetasemelisi eesmärke ja lühiajalisi Action Chunksi, eriti mitmeetapiliste või ettekavatsetud takistustega ülesannete jaoks.
- Sensorite liitmine: integreerida surve- ja jõuandmed visuaalsete esindustega, et parandada haarde ja pehme manipuleerimise kontrolli.
- Ohutus ja inimsõbralikkus: tagada, et käitumismustrid oleksid ennustatavad ja turvalised inimeste läheduses, sh reaktiivsed turvaplansid hädaolukordadeks.
Kokkuvõte
Robotics-0 ei väida, et see lahendaks kõik robotika väljakutsed, kuid see näitab pragmaatilist suunda: hoida tajumine ja tegevus tihedalt joondatuna, ilma et üks osa teist kannataks. Arhitektuurilised valikud — Mixture-of-Transformers, VLM ja Diffusion Transformer, asünkroonne inferents, Clean Action Prefix ja lambda-kujuline tähelepanu — annavad kokkuvõttes mudeli, mis töötab hästi nii simulatsioonis kui reaalses maailmas. See on meeldetuletus, et edasiminek võib tulla nii nutikatest arhitektuurivalikutest kui ka suurematest mudelitest.
Kui uurite robotite tulevikku, jälgige, kuidas see tööriist ja selle komponendid levivad avatud lähtekoodi projektides ja tööstuse rakendustes. Võib-olla on järgmine kord, kui kodurobot voldib rätiku, teie kodus märgata Robotics-0 ideede peenikest käekirja.

Comments
No comments yet.
Leave a Comment